OSC PIBOT framework
provides an artist-friendly OSC based interface that allows for improvisational and performative control of robotics
EXAMPLE FILES AND DOWNLOADS
The following files are example files in a variety of software for the OSC PIBOT framework as well as example network diagrams.
Pages:
Examples are planned for Isadora, Qlab, Max-MSP / Pure-Data and Touch-OSC and contributions of samples for other software tools such as touchdesigner are welcomed.
PIBOT Network architecture
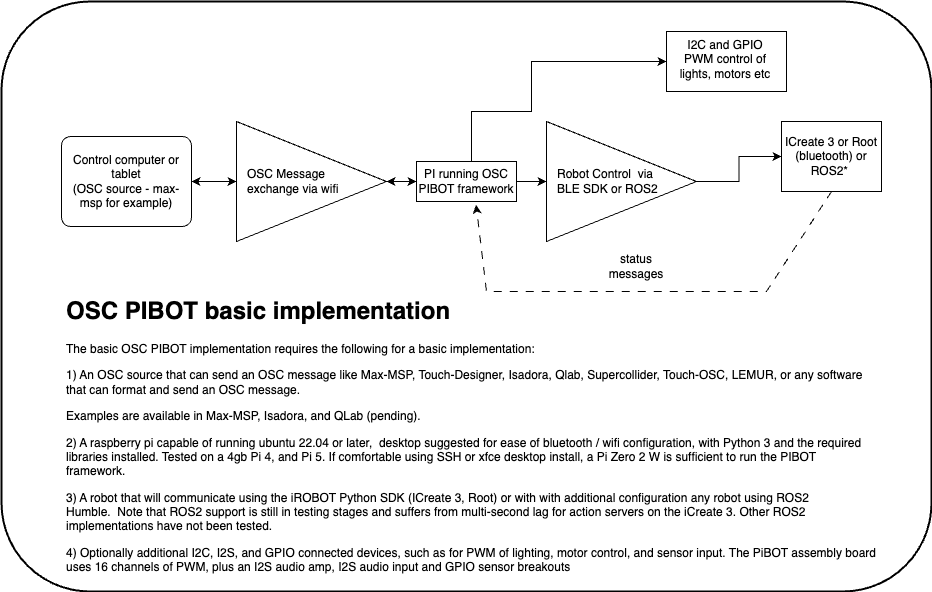
schematic of the basic pibot architecture
schematic of PIHUB with multiple bots
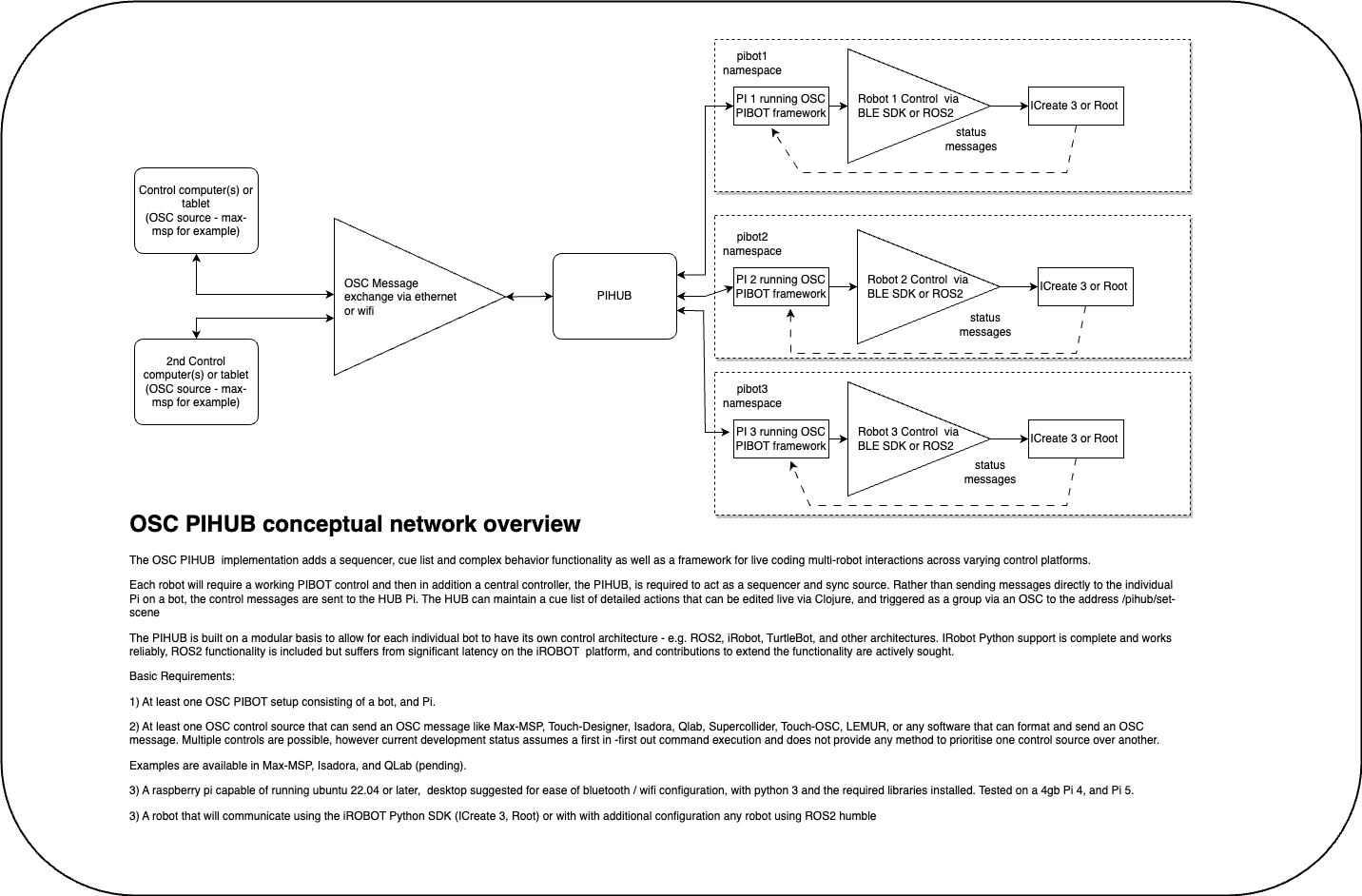
Click to download a detailed network architecture diagram of a 3 robot network using the PIHUB
LED and Motor Control Board Schematic
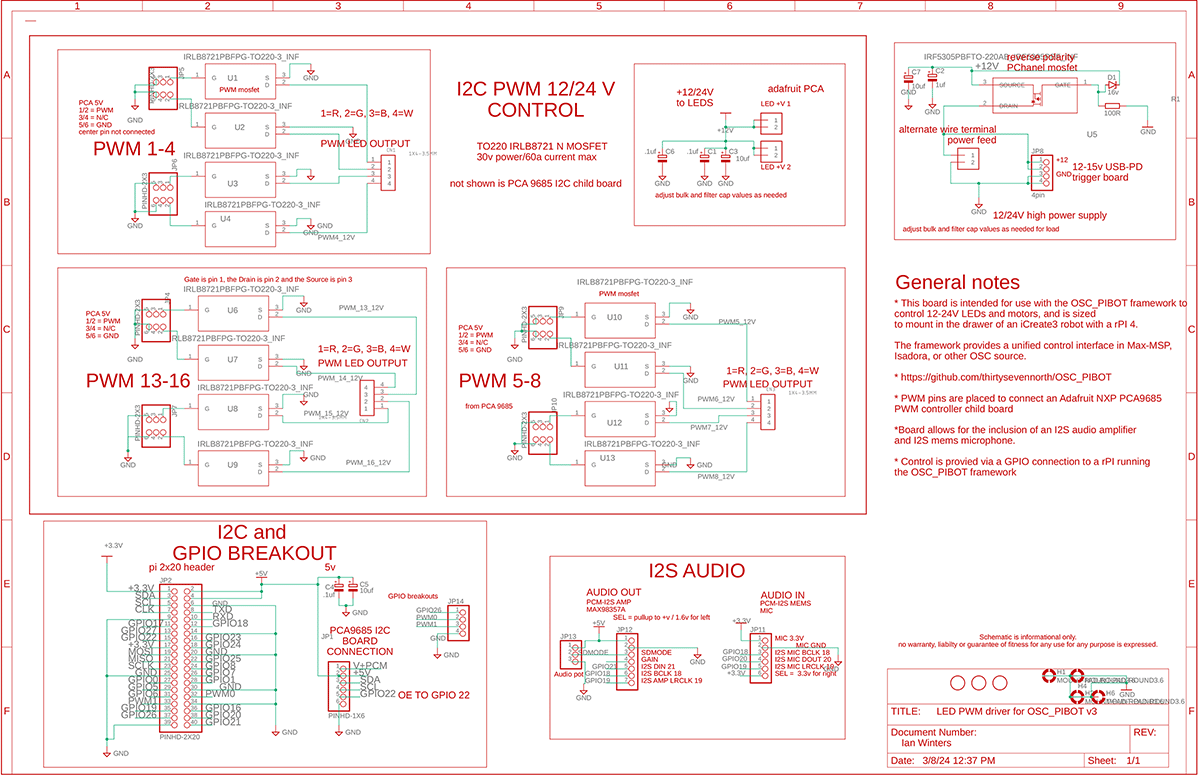
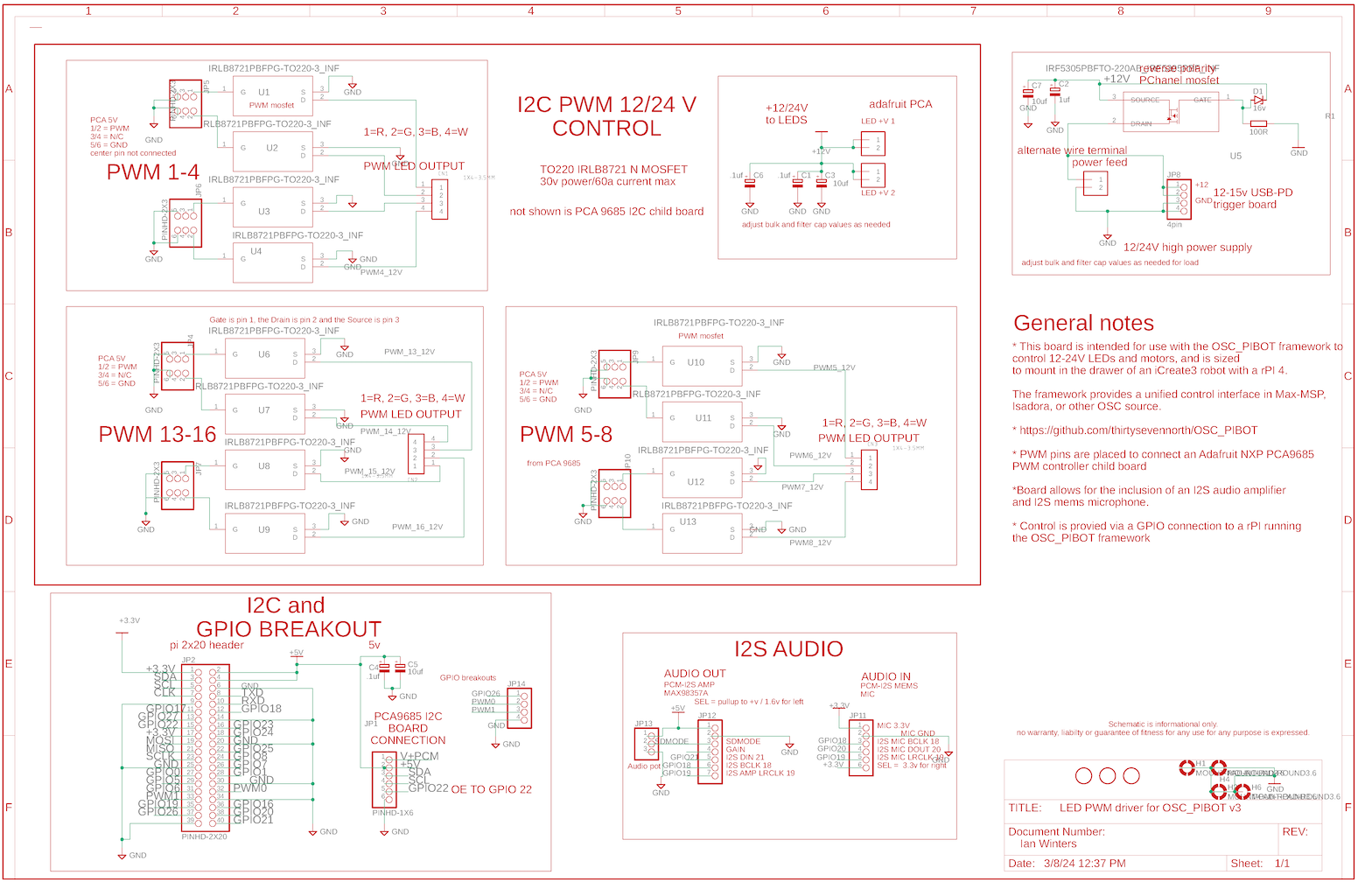
The PIBOT library is also intended to control and receive data from I2C, GPIO, and I2S connected to the Bot’s Raspberry Pi. For the library a series of boards have been developed implmenting 12v-24v/3a channel PWM support for 12 channels of LED or motors using an NXP PCA9685 or the adafruit PCA9685 board, 4 channels of 5v/ 25ma PWM, and space to include an Adafruit MAX9835757 I2S amplifier, and I2S mic board. I2S support in software is still experimental.
Board schematic
The following is a schematic of the circuit board intended for use with the ICreate 3.0 but adaptable to any I2C / I2S use.
 Pleasecontact us for more copies of boards.
Pleasecontact us for more copies of boards.
{kind=link}
GPIO PINS used
The RPI GPIO pins in use on the board for I2C and I2S support
Pin 2, 4 5V power
Pin 6, 14 GND
Pin 3 SDA GPIO2
Pin 5 SCL GPIO3
Pin 12 PCM_CLK GPIO18
Pin 35 PCM_FS GPIO19
Pin 37 GPIO26 (for analog I/O)
Pin 38 PCM_DIN GPIO20
Pin 40 PCM-DOUT GPIO21
EXAMPLE FILES
PIHUB Cue List Example(written in Clojure)
This sample cue list provides an example of a cue list intended for use with the PIHUB to control multiple robots and devices via a single OSC cue. PIHUB Cue List Example
Isadora 3.2.6 example file
You can learn about Isadora, download a trial or license it at https://troikatronix.com.
This patch assumes a working Raspbery Pi running the PIBOT framework and Icreate robot in communication with it, and that the computer running Isadora is on the same local network with no barriers to sending OSC. Optionally it also assues a secondary circuit board for PWM/ Lighting / motor control.
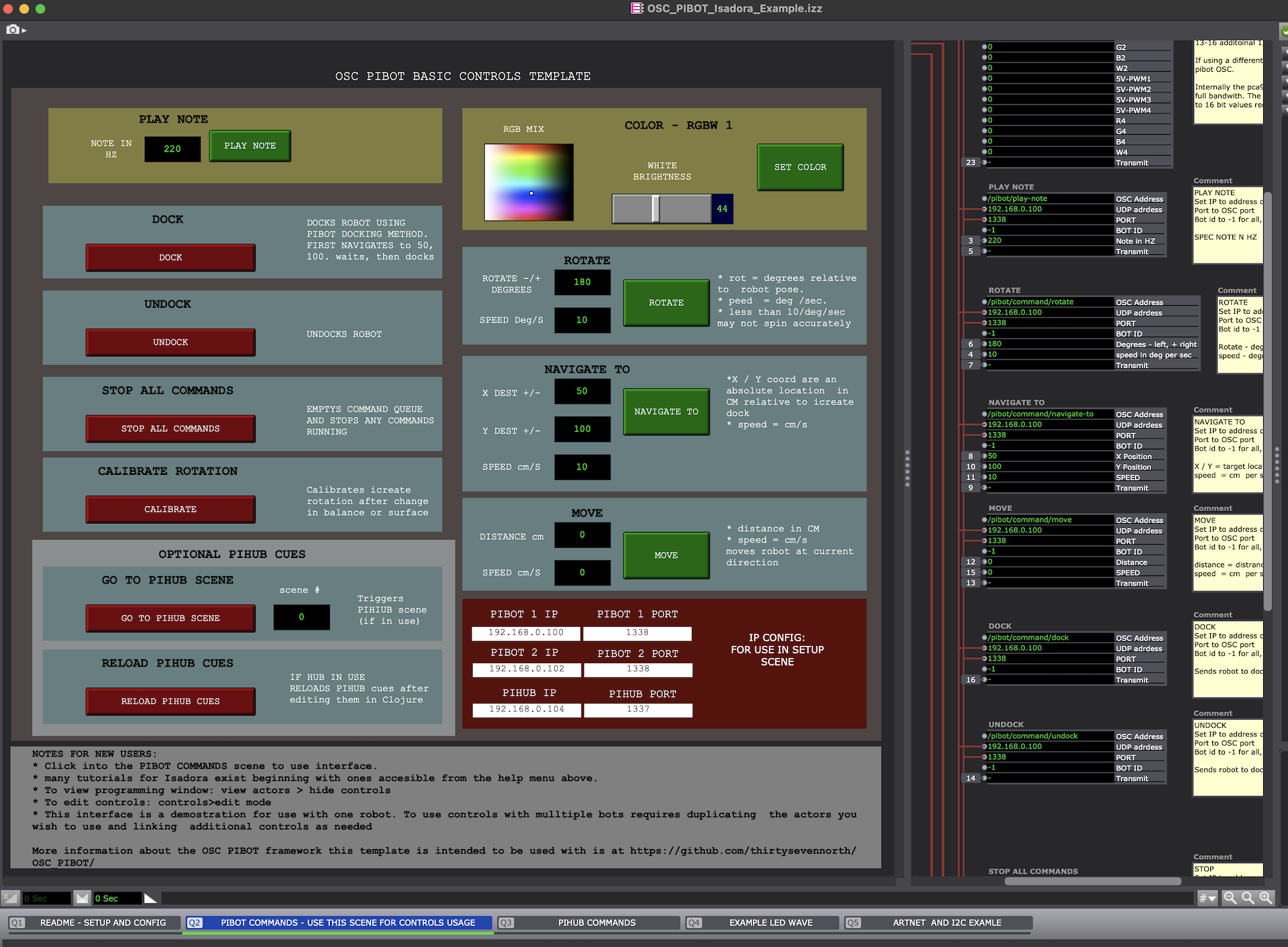
Isadora Setup for PIBOT
requirements
- Have a copy of Isadora v 3.2.6or later installed on your machine.
- Download and open the Isadora Example file in Isadora 3.2.6 or later.
- Enter the IP and port addresses for your PIBOT, HUB (if one) and secodary OSC target (if one) in the first scene.
- Click to the PIBOT COMMANDS scene for a list of commands for the iCreate, and the PIHUB scene for additional commands to provide global scene control via the hub sequencer.
- To use the Isadora “controls” surface select View > Show Controls to show the controls surface made for the PIBOT commands.
MAX-MSP example file
- to do
TOUCH OSC Example Layout
- to do
TOUCHDESIGNER example file
- to do
QLab Network Cue example file
- Requires Qlab license enabled to send Network Cues Example to do
SUPERCOLLIDER example file
- to do